If you race 1/10 or 1/8 RC, you own four motor tuning knobs: rotor diameter, mechanical (endbell) timing, ESC timing (static / boost / turbo), and gearing. Most tuning guides tell you which numbers to dial in. Almost nobody explains what each knob is physically doing inside the motor, or how they stack on top of each other when you turn more than one at a time.
That mental model is the difference between racers who can show up at a new track and tune in 30 minutes, and racers who chase setup baselines off forum threads forever. This article walks through each knob, what it changes electrically, and how to read the symptoms back the other way (“motor is hot but slow at the end of the straight” → which knob).
See also: if you also race with LiPo packs (you do), the deep-dive on LiPo charging pairs with this. The RC Battery Runtime Calculator turns gearing and amp draw into runtime so you can size a pack for your class.
How a brushless motor actually works (60 seconds)
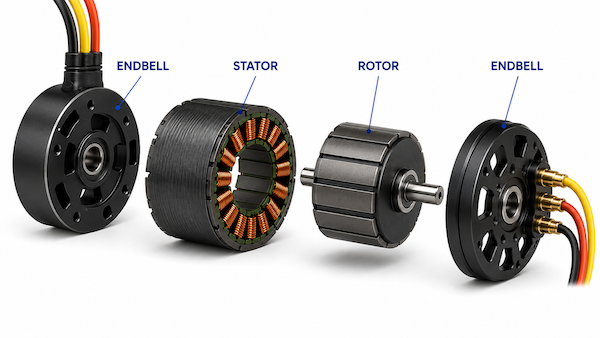
A sensored brushless inrunner — the kind every modified and stock class uses — is built around three pieces:
- Stator: a laminated iron core with three sets of copper windings (the “phases”). Almost always wye/star-wound for RC, sometimes delta for higher Kv at the same turn count.
- Rotor: a two-pole neodymium permanent magnet that spins inside the stator. This is the piece you swap in and out for different diameters.
- Endbell: holds the bearings, the sensor board (three Hall-effect sensors that read rotor position), and the wiring. The whole endbell rotates relative to the can — that’s where mechanical timing comes from.
The ESC commutates by energizing the three phases in sequence, using the sensor signals to know exactly where the rotor is. That precision is why sensored systems can pull cleanly from zero RPM (sensorless ESCs guess from back-EMF and stumble at low RPM, which is why race-start cogging is almost always a sensor problem).
Kv, Kt, and the “T” rating
Kv (motor velocity constant) is how many RPM the motor turns per volt of applied back-EMF, with no load. A 17.5T race motor reads about 2,500–2,800 Kv; a 13.5T reads about 3,200–3,600; a 5.5T mod motor reads around 7,000+.
Kt (torque constant) — torque produced per amp of current — is the reciprocal of Kv. The relationship is exact for an ideal three-phase brushless motor:
Kt ≈ 8.3 / Kv (N·m/A, with Kv in RPM/V)
So lower Kv = higher torque per amp = more pull, less top speed at a given voltage. Higher Kv flips it.
The “T” (turns) rating is the number of times the wire is wound around each stator tooth. More turns → more flux per amp → lower Kv → higher torque per amp → higher coil resistance → lower max current. Same motor frame, same magnets, same rotor — only the winding changes between a 13.5T and a 17.5T from the same product line.
Knob 1: Rotor diameter (the most misunderstood)
The rotor is a magnet that spins. Magnets at different diameters change the motor’s behavior in two ways:
- A bigger-diameter rotor puts the magnet surface closer to the stator teeth. That increases air-gap flux density → more torque per amp, lower Kv, more iron and eddy-current loss (loss scales with the square of flux density). Net: more grunt, lower RPM ceiling, runs hotter at the same load.
- A smaller-diameter rotor does the inverse: less torque per amp, higher Kv, fewer iron losses, runs cooler. Spins more freely on the bench.
That’s the entire story electrically, and it’s why racers reach for a different rotor as conditions change.
Common race rotor sizes (2-pole 1/10 inrunner)
| Diameter | Typical use |
|---|---|
| 12.0 mm | Light, very high RPM, runs coolest. Niche. |
| 12.3 mm | ROAR 25.5T spec rotor; also the “blinky” rotor in some 17.5T lines. |
| 12.5 mm | The default for most 17.5/13.5 race motors. Hobbywing V10 G3R, Reedy Sonic 540-FT, R1 Wurks V21/V30. |
| 12.86 mm | Oversized — Trinity D-series, super-stock and modified. |
| 13.0–13.5 mm | Modified / no-rules-outlaw only. Fantom 13.0 mm tuning rotor lives here. |
Long vs short rotors
You can add torque by making the rotor longer instead of wider. R1 Wurks’ long high-torque rotors sit at the ROAR length limit (12.5 mm × 25.9 mm) and add grunt without the big diameter’s thermal penalty. Some racers run a long 12.5 mm rotor in blinky stock for extra punch out of the corner without losing the cooler-running characteristic of the smaller diameter.
“If overheating, switch to a smaller rotor”
Partly true. Going smaller does drop iron losses and raise Kv, which usually drops case temperatures. But if the heat came from too much ESC timing, undergearing, or a chassis with no airflow, swapping the rotor only masks the symptom. Check gearing and timing first; reach for a smaller rotor when those are right and you’re still hot.
Class restrictions
ROAR specifies a maximum rotor diameter and length for spec classes — confirm the exact numbers in the current rulebook, but in practice 25.5T spec motors run 12.3 mm rotors, and 17.5T stock racers run 12.3 or 12.5 mm depending on the line. “Sealed stock” only applies to entry-level RTR motors (Traxxas / Castle / similar); every competition stock motor from Reedy, Hobbywing, R1, Tekin, ProTek, and Trinity is designed to tear down and swap rotors.
Knob 2: Mechanical (endbell) timing
Mechanical timing is the physical rotation of the sensor board (and thus the commutation reference) relative to the rotor magnets. Advancing it tells the ESC the rotor is further along than it really is, so the next phase is energized earlier — the analog of advancing the spark in an internal-combustion engine.
The range on most race motors is 0 to ~60°. Theoretical maximum on a 2-pole 3-phase motor is 60° per phase; Hobbywing flags anything over 50° as dangerous.
Side effects of adding mechanical timing
- More RPM and top speed (good).
- More current at the same RPM (bad — heats the windings as I²R).
- Lower efficiency at constant output (bad — pack sags faster, motor runs hotter).
- Applied across the entire RPM band — unlike ESC boost, which only kicks in at higher RPM.
Etched marks are reference only
The endbell’s timing index is a starting line, not the truth. A motor analyzer (Hobbywing Tunalyzer, G-Force, SkyRC) reads the actual sensor positions, and the analyzer’s number routinely sits 5–15° off the etched mark. If your class lets you tune timing, set it by the analyzer reading, not the can mark. If it’s a 0° spec class, you still want to confirm that the analyzer reads close to 0° — not just that the index aligns.
Class rules
- Blinky stock (17.5/21.5/25.5): ESC blinky mode, no boost, no turbo. Motor timing typically locked at 0° on the can — check your specific rulebook because some clubs allow up to 35° on the motor while still running blinky on the ESC.
- Super stock / boosted stock: motor timing modest (0–10°), ESC boost and turbo allowed within class limits.
- Modified: motor timing 20–35° on the can is normal, often stacked with heavy ESC boost.
Knob 3: ESC timing — static, boost, and turbo
Modern race ESCs (Hobbywing XR10 Pro G3, Tekin RSXPro / RX8 Gen3-4, Maclan MMAX, Reedy Blackbox 1000Z+/2000Z+/610R, Trinity Revolution) all expose three timing knobs that add on top of the motor’s mechanical timing:
Static timing
A fixed electrical advance the ESC adds at every RPM. Effectively the same as more mechanical timing, just done electronically. Banned in blinky.
Boost timing
A programmable RPM ramp. Below the start RPM, boost is zero. Between start and end RPM, advance ramps up linearly to its peak value. Above end RPM, peak boost holds.
This is the most useful knob in stock and super-stock racing because at low RPM you have no extra advance (so the motor isn’t cooking off the line or in slow corners), but you still get top-end RPM growth on the straight. Typical settings:
- 17.5 super-stock: boost start ~3,000–5,000 RPM, end ~25,000–35,000 RPM, peak 25–40°.
- 13.5 modified: boost peak 30–45° on top of 20–30° mechanical, for a peak motor advance of 50°+.
Turbo timing
A separate timing step engaged at full throttle (or above a programmable RPM gate), usually with a small delay and a slew rate so it can’t punch on during throttle stabs. Used for straight-line top speed without overheating in corners. 25–38° with a 0.05–0.20 s delay is typical for 1/10 stock.
Boost vs static — why boost runs cooler
Same peak advance, but boost only applies it at high RPM where the motor can actually convert it into RPM rather than heat. Static advance at 30° cooks the windings in slow corners; 30° of boost peaking at 25,000 RPM costs you nothing in those slow corners. Same top end, much lower temps.
The stacking rule
Real motor advance at any moment = mechanical timing + static ESC timing + current boost + current turbo. If you’re running 25° on the can and 30° of peak boost, your motor is seeing 55° of advance at full RPM. Stack carefully — “a little more timing” on the ESC plus a long rotor plus 30° on the can can put you in a degrees-of-advance neighborhood where motors cook in one heat.
Knob 4: Gearing
The single biggest temperature lever, and the one racers reach for last. Pinion-to-spur ratio (and final drive ratio after internal gears) sets how hard the motor has to work to spin the tires.
- Geared up (bigger pinion or smaller spur): more top speed, motor works harder at a given RPM, runs hotter, burns more battery.
- Geared down: less top speed, motor spins up easier, runs cooler, longer runtime.
If your motor is hitting 190°F at the end of every run, a two-tooth drop on the pinion will usually drop temps 15–30°F — way more than rotor or timing changes. The cost is some top end. Trade as needed.
FDR (final drive ratio) folds the internal diff ratio in. Two cars with the same pinion/spur can have very different FDR depending on the diff ratios, so always compare cars at the FDR level, not the pinion/spur level.
How the four knobs interact
The pattern most racers miss: each knob has the same direction of effect, and they stack. Bigger rotor, more mechanical timing, more ESC boost, taller gearing — all push the motor toward more torque, more RPM, more current draw, more heat. If you change one, leave the others alone for at least a pack so you can read the result.
| Symptom | What to reach for first |
|---|---|
| Motor hot, slow at end of straight | Gear up or switch to higher Kv (smaller / shorter rotor), but check timing isn’t already maxed. |
| Motor hot, decent top end | Gear down, then check ESC boost isn’t starting too low in the RPM band. |
| Motor cool, slow off the corner | Bigger / longer rotor for more torque, or small mechanical timing bump. |
| Motor cool, slow at top end | Add ESC boost (end RPM up), or gear up. |
| Cogging at start of run | Sensor cable. Replace and re-test before touching anything else. |
| Pack sagging hard mid-run | Total advance is too high (mechanical + static + boost). Roll one back. |
Motor temperature: how hot is too hot?
The numbers that matter
| Case temp at pull-off | State |
|---|---|
| 130–170°F (54–77°C) | Healthy. Stock and super-stock should live here. |
| 170–190°F (77–88°C) | Pushing it. Gear down or add a 40 mm fan. |
| 190–200°F (88–93°C) | Modified pulling hard. Tolerable but the upper bound. |
| 200°F+ (93°C+) | Damage zone. Back off now. |
What’s actually failing at 200°F
The community number is empirically right but the physics is more nuanced than “magnets demagnetize at 200°F.” Standard N-grade neodymium has an operating ceiling around 80°C (176°F) — already below racer temps. Race motors use higher-coercivity grades (H or SH), which tolerate 120–150°C (250–300°F) at the magnet itself. The 200°F case-temperature limit assumes the magnet is hotter than the can by 10–20°F at steady state, and that the rotor magnet adhesive (epoxy) starts softening around the same point. So “200°F at the can” is roughly “magnet sitting at the edge of its grade’s safe operating envelope.”
The hand test is mostly useless
You can hold a finger to about 50°C / 122°F. Above that you can’t — so the hand test distinguishes “cool” from “warm,” not the 160–200°F band that actually matters. Spend $15 on an IR thermometer and aim it at the can within five seconds of pulling off track. ESC-reported motor temps (Hobbywing G3, Maclan MMAX) read a sensor wire taped to the can — comparable to an IR gun, and treat both as the minimum internal temperature.
How to tell if you’ve cooked one
A damaged rotor magnet permanently raises the motor’s Kv (less back-EMF per turn) and lowers Kt. Symptoms:
- Bench-spin Kv reads 5–15% higher than its original spec or its sibling motor.
- Pulls more amps to make the same RPM under load.
- Feels less crisp when you snap the rotor in by hand — the magnetic “grab” is weaker.
If you suspect a cook, an analyzer reading at known voltage is the objective check. A 5% Kv lift is usually irreversible.
Maintenance
Bearings
Two ball bearings per motor — one in the endbell (sensor side), one in the front cover. Exact bore × OD × width varies by motor (Tekin Redline Pro 4: 5×14×5 front, 5×11×5 rear; other lines differ). Spin by hand off-throttle: gritty, whining, or wobbling means replace. Light bearing oil (Boca, Trinity, Reedy) every weekend if you race in dust. Cleaned with electronic contact cleaner if grease is fouled — never WD-40, never brake clean on plastics.
Sensor cable
The most common cause of mid-race weirdness. Bent pins at the JST connector, broken conductors at the strain reliefs, corrosion on contacts. Symptom is cogging at startup or at specific rotor positions. Test by swapping in a known-good cable — if the cog clears, replace.
Stator and rotor cleaning
Tear down every 5–10 race days for stock; more often for modified or off-road dust. Blow out with compressed air. Wipe stator teeth with motor spray (contact cleaner). Inspect rotor for magnet edge chips and any steel debris stuck to the magnets — debris in the air gap will gouge the stator and rapidly destroy the motor.
Solder and wire
Re-flow bullet connectors at the motor leads every season; check for cracked solder where the leads exit the can.
Worked examples
1/10 17.5 blinky stock (US ROAR carpet)
- Motor: Hobbywing V10 G3R or Reedy Sonic 540-FT, 12.5 mm rotor (or 12.3 if the line uses it).
- Mechanical timing: 0° on the can (verified on analyzer).
- ESC: blinky mode, drag brake 8–15%, drive frequency 12–16 kHz.
- Gearing: track-dependent; typical indoor carpet 84 spur / 24–30 pinion.
- Target temps: 130–160°F.
1/10 super stock (boosted 17.5)
- Motor: same frame, “super stock” rotor (Hobbywing’s second SKU for the V10, or 12.3 mm in some lines).
- Mechanical timing: 0–10°.
- ESC: boost start ~3,500 RPM, end ~30,000 RPM, peak ~30°. Turbo 25–35° at full throttle with 0.10 s delay.
- 40 mm motor fan mandatory.
- Target temps: under 180°F.
1/10 13.5 modified
- Motor: 13.5T with a 12.5 mm rotor (or 12.86 mm in unrestricted classes).
- Mechanical timing: 25–35°.
- ESC: boost peak 30–45° on top of mechanical, turbo 25°+ at full throttle.
- 40 mm motor fan + ample airflow.
- Target temps: 180–200°F is normal.
1/8 4S buggy
- Motor: 4030–4274 can, 1,900–2,400 Kv (Reedy Sonic 540-S Plus, Tekin Pro 4, Hobbywing G3 1/8).
- Rotor diameter is a much smaller tuning lever here — most tuning happens at the gearing layer.
- ESC: 130–160 A class (Tekin RX8 Gen3-4, Hobbywing MAX10G2, Maclan MAX 8). Static timing yes, boost/turbo more conservative than 1/10 mod.
- Target temps: 180–200°F.
Myths, fact-checked
“Bigger rotor = more torque, smaller = more RPM.”
True. Kv and Kt are mathematical reciprocals; lower Kv (bigger rotor) trades RPM for torque per amp.
“Stock motors are sealed — you can’t swap the rotor.”
Outdated. Every competition stock motor (Reedy, Hobbywing, R1 Wurks, Trinity, Tekin, ProTek) is designed to tear down and swap rotors. Only RTR-grade sealed motors fit this old claim.
“Race motors use N52 magnets.”
Suspect. Standard N52 has an 80°C / 176°F operating ceiling — below temperatures real race motors routinely hit. Race motors almost certainly use H-grade or SH-grade NdFeB with higher temperature tolerance. Manufacturers don’t publish their grade.
“The mark on the endbell tells you the timing.”
The mark is a starting reference. The analyzer reading is the truth, and the two routinely differ by 5–15°.
“If my ESC says the motor is 80°C, the internal temp is 90°C.”
Approximately right. ESC-reported temps come from a sensor wire taped to the can, not from inside the windings. The stator copper runs 5–15°C hotter than the can at thermal steady state, more during a hard pull. Treat ESC temps as the minimum internal temp.
“Static timing and boost are interchangeable.”
No. Same peak advance, but boost only applies it above a programmable RPM. Static cooks at low RPM where the motor can’t convert the advance to speed; boost doesn’t.
“Sensored motors don’t lose Kv over time.”
True as long as the magnets stay cool. Once you cook a rotor, the Kv shift is permanent and the motor never makes the same torque again.
Quick reference for racers
- Rotor diameter — bigger & longer = more torque, hotter, lower Kv. Smaller = cooler, higher Kv, less torque. Class rules cap diameter.
- Mechanical timing — trust the analyzer, not the etched mark. Adds advance across all RPMs. Stock blinky is usually 0°.
- ESC static timing — banned in blinky. Functionally identical to more mechanical timing.
- ESC boost — cooler than the same advance as static, because it only kicks in at higher RPMs. Tune start, end, peak.
- ESC turbo — full-throttle gate for straight-line top end. Use delay and slew to keep it off in throttle stabs.
- Gearing — biggest temperature lever. Drop two teeth on the pinion before chasing rotors or timing.
- Heat — 200°F (93°C) at the can is the back-off line. IR thermometer; the hand test only resolves “cool” vs “warm.”
- Maintenance — bearings by feel, sensor cable for cogging, full tear-down every 5–10 race days.
Next steps
- LiPo Charging for RC Racers: What the Science Actually Says — the motor side and the battery side share the same heat/efficiency tradeoffs.
- RC Battery Runtime Calculator — size a pack for your gearing + motor amp draw.
- RC Gear Ratio Chart Maker — explore gear ratio, FDR, and rollout side-by-side.